Qi. Wu
所属机构.博士生@上海交通大学.

这张照片拍摄于六年前,记录我还有头发时的样子.
E-Mail Address: robotics_qi ^AT sjtu.edu.cn
我是吴奇,是泡泡SLAM机器人团队的成员,目前在上海交通大学攻读博士学位,研究方向是基于多源传感器融合的SLAM算法。我的科研主要集中于基于新型传感器(如360度摄像头和毫米波雷达)的SLAM算法应用以及三维隐式重建算法(如NeRF)。我的博士生导师是郁文贤 和 裴凌老师.同时,我和陈谢沅澧老师合作紧密. 在这之前,我在北京邮电大学跟随邓中亮老师和焦继超老师获得了硕士学位; 我本科毕业于重庆邮电大学,在周牧老师的引导下,对于定位方向展开研究。
现在每天都会出现许多新的SLAM算法系统。我希望能尽自己的一份力,对每一个新系统进行拆解,让从业人员分析和筛选出自己需要的模块或系统。如果能帮到大家,这将是我最快乐的事情,也是这个blog存在的意义。如果您对这些领域有兴趣或在相关领域有专业知识,可以发送邮件到我的邮箱。十分期待可能的合作机会。
news
| Feb 26, 2024 | 我们的工作被CVPR(IEEE/CVF Conference on Computer Vision and Pattern Recognition)接收. ! |
|---|---|
| Dec 23, 2023 | 我们的工作被TIE(Transactions on Industrial Electronics)接收. ! |
| Jul 14, 2023 | 我们的工作被ICCV(International Conference on Computer Vision)接收(共同第一作者). ! |
selected publications
-
 KPA-Tracker: Towards Robust and Real-Time Category-Level Articulated Object 6D Pose TrackingIn aaai , 2024
KPA-Tracker: Towards Robust and Real-Time Category-Level Articulated Object 6D Pose TrackingIn aaai , 2024 -
 Dynamic Inertial Poser (DynaIP): Part-Based Motion Dynamics Learning for Enhanced Human Pose Estimation with Sparse Inertial SensorsIEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024
Dynamic Inertial Poser (DynaIP): Part-Based Motion Dynamics Learning for Enhanced Human Pose Estimation with Sparse Inertial SensorsIEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024 -
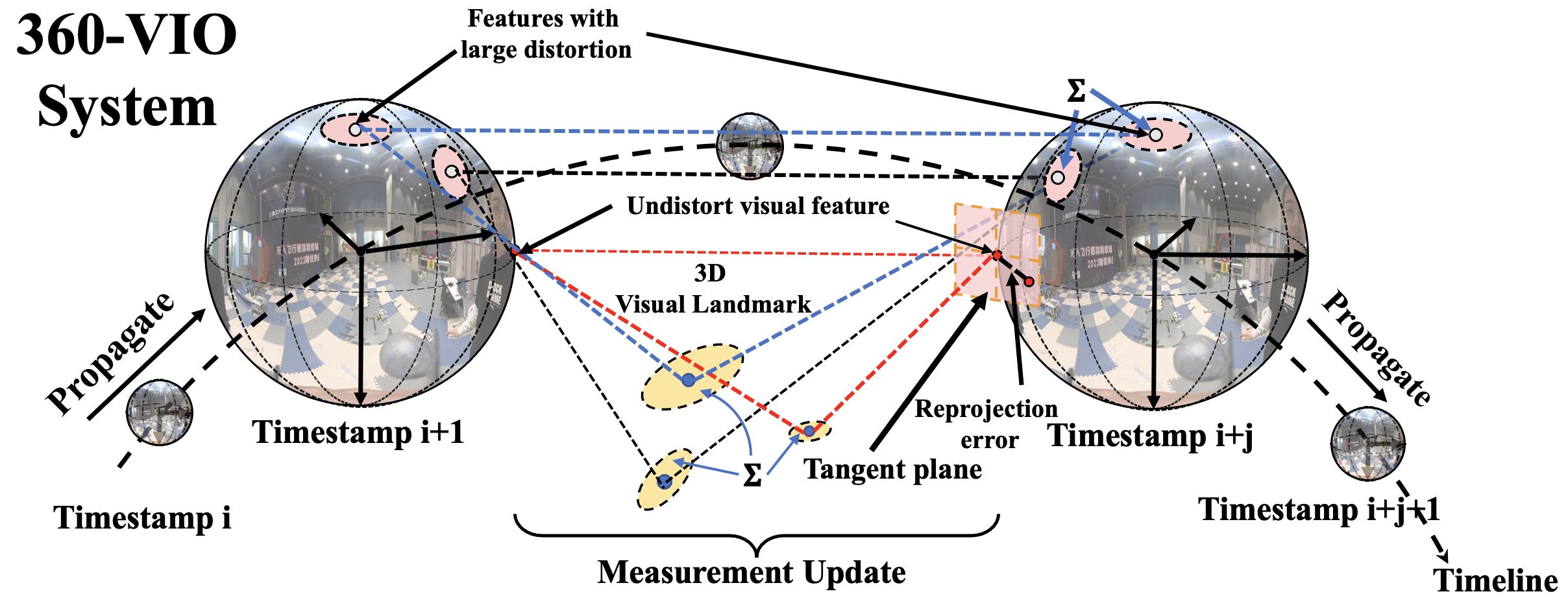 360-VIO: A Robust Visual–Inertial Odometry Using a 360° CameraIEEE Transactions on Industrial Electronics, 2023
360-VIO: A Robust Visual–Inertial Odometry Using a 360° CameraIEEE Transactions on Industrial Electronics, 2023 -
 Nerf-loam: Neural implicit representation for large-scale incremental lidar odometry and mappingIn iccv , 2023
Nerf-loam: Neural implicit representation for large-scale incremental lidar odometry and mappingIn iccv , 2023


